|
XWOS API
4.0
XWOS C/C++ API参考手册
|
|
XWOS API
4.0
XWOS C/C++ API参考手册
|
玄武设备栈:UART控制器 更多...
#include <xwcd/ds/standard.h>#include <string.h>#include <xwos/osal/lock/spinlock.h>#include <xwos/osal/lock/mtx.h>#include <xwos/osal/sync/sem.h>#include <xwcd/ds/uart/controller.h>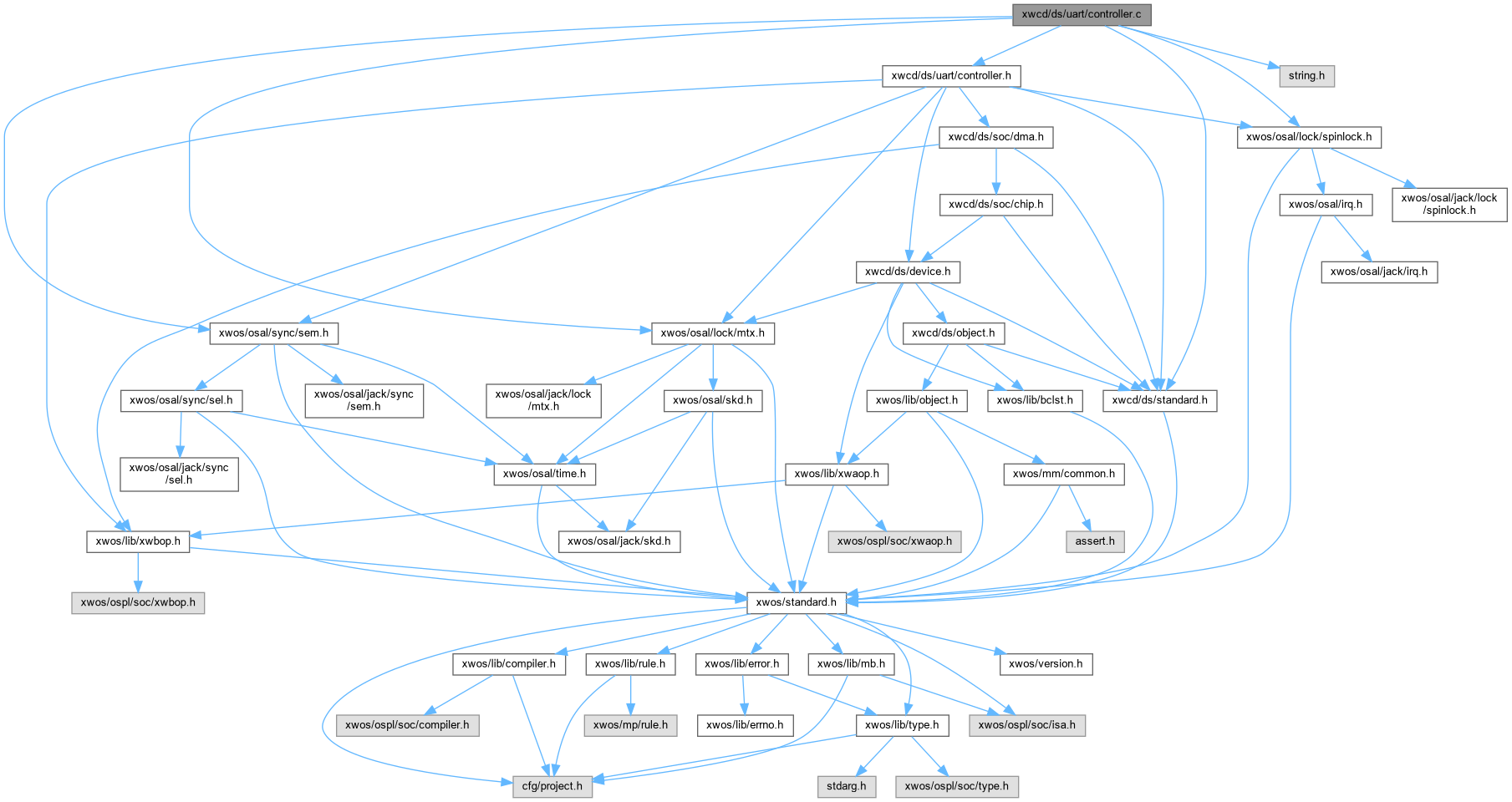
函数 | |
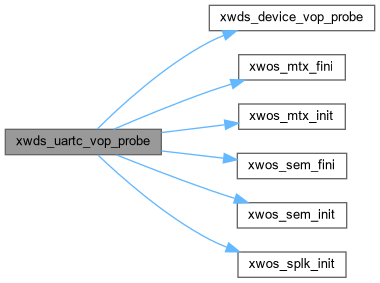
| static xwer_t | xwds_uartc_vop_probe (struct xwds_uartc *uartc) |
| XWDS VOP:探测UART控制器 | |
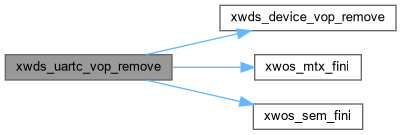
| static xwer_t | xwds_uartc_vop_remove (struct xwds_uartc *uartc) |
| XWDS VOP:移除UART控制器 | |
| static xwer_t | xwds_uartc_vop_start (struct xwds_uartc *uartc) |
| XWDS VOP:启动UART控制器 | |
| static xwer_t | xwds_uartc_vop_stop (struct xwds_uartc *uartc) |
| XWDS VOP:停止UART控制器 | |
| static xwer_t | xwds_uartc_vop_suspend (struct xwds_uartc *uartc) |
| XWDS VOP:暂停UART控制器 | |
| static xwer_t | xwds_uartc_vop_resume (struct xwds_uartc *uartc) |
| XWDS VOP:继续UART控制器 | |
| void | xwds_uartc_construct (struct xwds_uartc *uartc) |
| XWDS API:UART控制器的构造函数 | |
| void | xwds_uartc_destruct (struct xwds_uartc *uartc) |
| XWDS API:UART控制器对象的析构函数 | |
| xwer_t | xwds_uartc_grab (struct xwds_uartc *uartc) |
| 增加对象的引用计数 | |
| xwer_t | xwds_uartc_put (struct xwds_uartc *uartc) |
| 减少对象的引用计数 | |
| xwer_t | xwds_uartc_rx (struct xwds_uartc *uartc, xwu8_t *buf, xwsz_t *size, xwtm_t to) |
| XWDS API:从接收队列中获取数据 | |
| xwer_t | xwds_uartc_try_rx (struct xwds_uartc *uartc, xwu8_t *buf, xwsz_t *size) |
| XWDS API:尝试从接收队列中获取数据 | |
| xwer_t | xwds_uartc_tx (struct xwds_uartc *uartc, const xwu8_t *data, xwsz_t *size, xwtm_t to) |
| XWDS API:同步发送 | |
| xwer_t | xwds_uartc_etx (struct xwds_uartc *uartc, const xwu8_t *data, xwsz_t *size) |
| XWDS API:紧急发送 | |
| xwer_t | xwds_uartc_eq (struct xwds_uartc *uartc, const xwu8_t *data, xwsz_t *size, xwds_uartc_eqcb_f cb) |
| XWDS API:异步发送 | |
| xwer_t | xwds_uartc_putc (struct xwds_uartc *uartc, const xwu8_t byte, xwtm_t to) |
| XWDS API:直接发送一个字节(非DMA模式) | |
| xwer_t | xwds_uartc_cfg (struct xwds_uartc *uartc, const struct xwds_uart_cfg *cfg) |
| XWDS API:配置UART | |
| void | xwds_uartc_drvcb_rxq_flush (struct xwds_uartc *uartc) |
| XWDS Driver Callback:清空接收队列 | |
| xwsq_t | xwds_uartc_drvcb_rxq_fill (struct xwds_uartc *uartc, xwu8_t bytes[], xwsz_t size) |
| XWDS Driver Callback:从UART硬件接收数据到缓冲区 | |
| void | xwds_uartc_drvcb_rxq_pub (struct xwds_uartc *uartc, xwsq_t pub) |
| XWDS Driver Callback:发布数据到接收队列 | |
变量 | |
| const struct xwds_virtual_operation | xwds_uartc_vop |
玄武设备栈:UART控制器
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
在文件 controller.c 中定义.
|
static |
XWDS VOP:探测UART控制器
| [in] | uartc | UART控制器对象指针 |
<No error
在文件 controller.c 第 115 行定义.
|
static |
XWDS VOP:移除UART控制器
| [in] | uartc | UART控制器对象指针 |
<No error
在文件 controller.c 第 147 行定义.
|
static |
XWDS VOP:启动UART控制器
| [in] | uartc | UART控制器对象指针 |
在文件 controller.c 第 169 行定义.

|
static |
XWDS VOP:停止UART控制器
| [in] | uartc | UART控制器对象指针 |
在文件 controller.c 第 187 行定义.

|
static |
XWDS VOP:暂停UART控制器
| [in] | uartc | UART控制器对象指针 |
在文件 controller.c 第 202 行定义.

|
static |
XWDS VOP:继续UART控制器
| [in] | uartc | UART控制器对象指针 |
在文件 controller.c 第 215 行定义.

| const struct xwds_virtual_operation xwds_uartc_vop |
在文件 controller.c 第 56 行定义.