调度器
Categories:
3 分钟阅读
概述
- XWOS调度器最基本的调度单位是 线程 ,暂时不支持 MMU虚拟内存 与 进程 ;
- 每个 线程 都有自己独立的 栈 内存,但所有内存对所有线程都可见,除非使用MPU增加限制;
- 每个 线程 都有调度优先级;
- 调度器可以冻结线程,支持电源管理;
- 每个CPU都有自己独立的调度器,线程只能在自身CPU的调度器中调度,如果需要在CPU间移动,需要进行 迁移 操作;
优先级
XWOS的优先级,用类型 xwpr_t 表示:
- 值越 小 ,优先级越 低 ,优先级的值越 大 ,优先级越 高 。
- 为了保证今后的扩展性,应该使用宏,而不要直接使用
xwpr_t的数值:- 最小优先级可以通过宏
XWOS_SKD_PRIORITY_RT_MIN获取 。 - 最大优先级可以通过宏
XWOS_SKD_PRIORITY_RT_MAX获取 。 - 无效优先级可以通过宏
XWOS_SKD_PRIORITY_RT_INVALID获取 。 - 其他优先级应该使用最大优先级和最小优先级进行计算获取:
- 降低优先级可以通过宏
XWOS_SKD_PRIORITY_DROP; - 提高优先级可以通过宏
XWOS_SKD_PRIORITY_RAISE。
- 降低优先级可以通过宏
- 最小优先级可以通过宏
调度算法
数据类型
- 每个优先级都有一个先进先出(FIFO)的 就绪 队列;
- 使用一个位图标记每个优先级队列是否为空;非空的队列对应的位被置1,否则被清0。
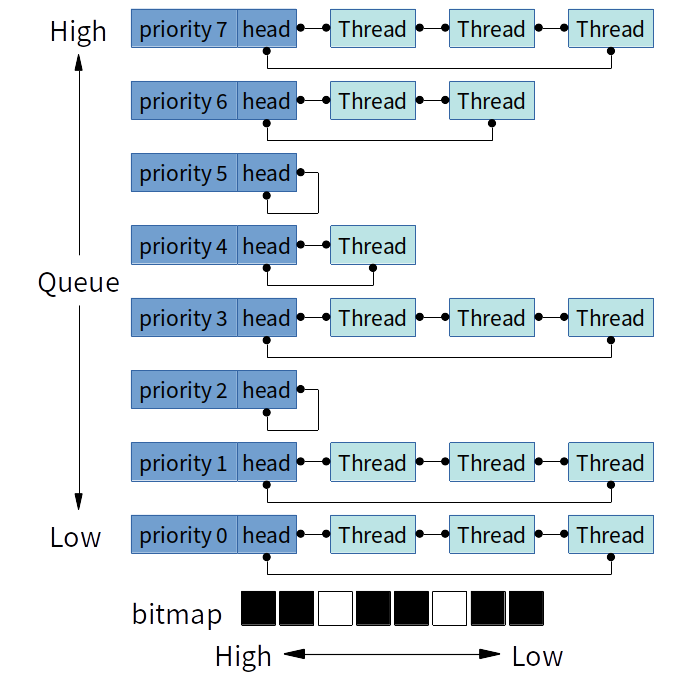
XWOS调度器就绪队列
Photo: xwos.tech / CC-BY-SA-4.0
调度流程
-
定义操作fls:从最高位起查找第一个被置1的位,并返回其序号, 如果所有位都为0,返回-1。此操作需要CPU的相关指令来实现,例如ARM的clz, DEC Alpha的ctlz,x86的lzcnt,PowerPC的cntlz等。
-
流程图
flowchart TB
start --> fls
fls --> idx
idx --否--> idle
idx --是--> q
q --> t
t --> skd
skd --> e
idle --> e
start("开始")
fls["idx = fls(bitmap)"]
idx{"idx >= 0 ?"}
idle["调度空闲任务"]
q["选择优先级为idx的就绪队列"]
t["从就绪队列头部选择第一个线程"]
skd["调度选择的线程"]
e("结束")
启动调度器
当 启动流程 进入 xwos_main() 后,可调用 xwos_skd_start_lc() 启动调度器,此时上下文(Context)将由 启动 切换为 线程 。
抢占
调度器始终选择优先级最高的线程,高优先级的线程可以抢占低优先级的线程。
相同的优先级的线程,调度器按照 先进先出 的方法调度,同优先级线程之间 不能 相互抢占。
用户可以关闭抢占: xwos_skd_dspmpt_lc() ,
也可以打开抢占: xwos_skd_enpmpt_lc() 。
调度器中的特殊任务
空闲任务
- 当调度器中没有任何线程就绪,调度器会调度空闲任务;
- 空闲任务比较特殊,属于 最低优先级 的线程上下文,但不能使用任何会导致睡眠与阻塞的函数。
- 用户可在空闲任务中HOOK用户代码,方法:
- 在配置文件
xwbd/电路板/cfg/board.h中定义配置BRDCFG_XWSKD_IDLE_HOOK为1; - 定义函数
board_xwskd_idle_hook()并在其中增加用户代码。
- 在配置文件
中断底半部任务
- 当调度器配置
XWOSCFG_SD_BH为1时, 调度器会为系统预留一个 最高优先级 线程; - 中断底半部任务比较特殊,属于线程上下文,但不能使用任何会导致睡眠、阻塞的函数;
- 中断底半部任务可抢占任何线程;
- 当开启中断底半部时,调度器的滴答定时器任务运行在中断底半部中;
- XWOS的中断底半部并未完全开发完成,目前只开放给滴答定时器任务使用。
用户可以关闭中断底半部: xwos_skd_dsbh_lc() ,
也可以打开中断底半部: xwos_skd_enbh_lc() 。
滴答定时器任务
- 操作系统内核通常都会包含一个定时器,用于产生固定周期的 滴答 (或称为 节拍 )中断;
- 滴答定时器任务也即是在此定时器中断中执行的周期性任务;
- 如果 中断底半部任务 配置为
1,滴答定时器任务运行在中断底半部任务内部; - 如果 中断底半部任务 配置为
0,滴答定时器任务运行在中断上下文中; - 用户可以在滴答定时器任务中HOOK自己的代码,方法:
- 在配置文件
电路板目录/cfg/board.h中定义配置BRDCFG_XWSKD_SYSHWT_HOOK为1; - 定义函数
board_xwskd_syshwt_hook()并在其中增加用户代码。
- 在配置文件
调度器的中断
切换上下文的中断
- 调度器用于切换正在执行的线程的中断
- 中断优先级: 最低
- 用户可在切换上下文时,Hook自己的代码:
- 在切换上下文开始之前:
- 在配置文件
电路板目录/cfg/board.h中定义配置BRDCFG_XWSKD_PRE_SWCX_HOOK为1; - 定义Hook函数
board_thd_preinit_hook()。
- 在配置文件
- 在切换上下文开始之后:
- 在配置文件
电路板目录/cfg/board.h中定义配置BRDCFG_XWSKD_POST_SWCX_HOOK为1; - 定义Hook函数
board_thd_postinit_hook()。
- 在配置文件
- 在切换上下文开始之前:
滴答定时器的中断
- 用于产生固定周期的 滴答 (或称为 节拍 )的定时器中断,滴答定时器任务由此中断触发执行。
- 中断优先级:
切换上下文的中断 <= 滴答定时器的中断 <= 调度器服务中断
调度器服务中断
- 用于执行调度器特殊操作的软中断,包括:
- 调度器休眠
xwosplcb_skd_suspend_lic() - 线程退出
xwosplcb_thd_exit_lic() - 线程冻结
xwosplcb_thd_freeze_lic() - 线程迁移
xwosplcb_thd_immigrate_lic()和xwosplcb_thd_outmigrate_lic()
- 调度器休眠
- 中断优先级:
切换上下文的中断 <= 滴答定时器的中断 <= 调度器服务中断
硬件定时器
- XWOS内核要求每个CPU都有一个私有的滴答定时器,产生固定频率的中断;
- 通常配置为 1000HZ ,可参考配置文件
xwbd/电路板/cfg/xwos.h中的配置XWOSCFG_SYSHWT_PERIOD; - XWOS的滴答定时器会产生三个变量:
tickcount滴答计数- 在每次滴答定时器中断时,
tickcount都会自增1; tickcount可以表示滴答定时器中断了多少次;tickcount是一个每CPU变量,代码运行在哪个CPU上,访问的就是哪个CPU的tickcount;- 通过CAPI
xwtm_nowtc()可以获取当前CPU的tickcount。
- 在每次滴答定时器中断时,
timetick系统时间- XWOS内核使用 纳秒(ns) 作为时间的基本单位,假设滴答器频率 1000HZ ,
tickcount每1ms增加一次,即每1ms增加1000000; timetick与tickcount的关系:timetick = tickcount * 1000000;timetick是一个每CPU变量,代码运行在哪个CPU上,访问的就是哪个CPU的timetick;- 通过CAPI
xwtm_now()可以获取当前CPU的timetick。 timestamp系统时间戳timestamp是以纳秒为单位的系统时间戳;timestamp是通过把滴答定时器到下一次中断还剩多少时间计算出来,再累加到timetick上获取的,其精度由SOC的主频与计数器的位宽决定;timestamp是一个每CPU变量,代码运行在哪个CPU上,访问的就是哪个CPU的timestamp;- 通过CAPI
xwtm_nowts()可以获取当前CPU的timestamp。
- XWOS内核使用 纳秒(ns) 作为时间的基本单位,假设滴答器频率 1000HZ ,
超时管理
时间树
XWOS内核中,每个需要超时管理的对象(线程、软件定时器)都是以 时间树节点 组织到时间树中。 时间树节点 中包含了超时的 系统时间点 ,调度器每次进入滴答定时器任务时,都会检测时间树中是否有节点超时。 在时间树中,所有节点的 系统时间点 都是未来的时间。最先超时的节点一定是 系统时间点 最小的节点。 因此时间树的超时问题就是寻找最小值的问题。XWOS使用红黑树解决此最小值的问题,因此算法被称为 时间树 。
- 使用一个 leftmost 指针指向最小值,超时可直接从 leftmost 快速获取最小值,时间复杂度为 O(1) ;
- 超时后, leftmost 从红黑树中被删除,按照二叉树的性质,下一任 leftmost 是前任的右孩子(即后继)。 如果前任的后继为叶子,下一任 leftmost 一定是前任的父节点,算法时间复杂度为 O(1) ;
- 删除 leftmost 在系统中是一个高频次的操作,但由于 leftmost 缺少左子树,根据红黑树性质,右子树也不可能太复杂, 意味着删除 leftmost 后,调整红黑树的代价不会太大;
- 插入操作需要遍历树,时间复杂度为 O(logn) ;
- 红黑树中不允许存在关键字相同的节点,因此拥有相同 系统时间点 的节点组成链表,超时后它们全部被唤醒。
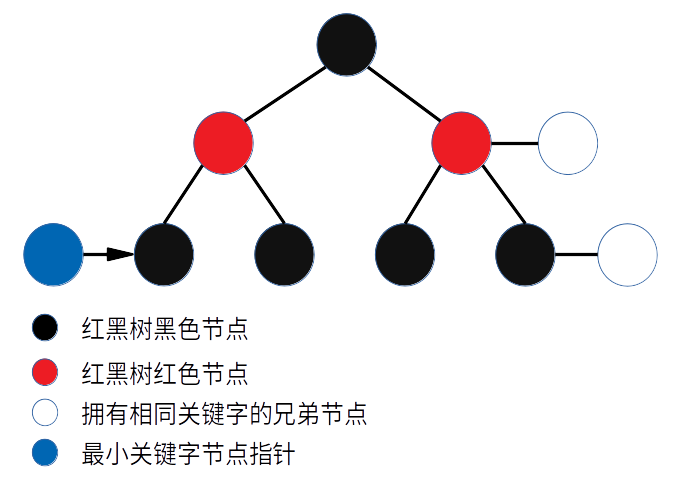
XWOS时间树
Photo: xwos.tech / CC-BY-SA-4.0
超时函数的统一形式
XWOS所有带超时管理的CAPI函数,都是以后缀 _to 结尾,超时的参数都为 xwtm_t to :
/* 睡眠 */
xwer_t xwos_cthd_sleep_to(xwtm_t to);
/* 等待信号量 */
xwer_t xwos_sem_wait_to(struct xwos_sem * sem, xwtm_t to);
/* 等待条件量 */
xwer_t xwos_cond_wait_to(struct xwos_cond * cond,
union xwlk_ulock lock, xwsq_t lktype,
void * lkdata, xwtm_t to, xwsq_t * lkst);
/* 等待互斥锁 */
xwer_t xwos_mtx_lock_to(struct xwos_mtx * mtx, xwtm_t to);
/* 等待信号旗 */
xwer_t xwos_flg_wait_to(struct xwos_flg * flg, xwsq_t trigger, xwsq_t action,
xwbmp_t origin[], xwbmp_t msk[],
xwtm_t to);
/* 等待信号选择器 */
xwer_t xwos_sel_select_to(struct xwos_sel * sel, xwbmp_t msk[], xwbmp_t trg[], xwtm_t to);
/* 等待线程同步 */
xwer_t xwos_br_wait_to(struct xwos_br * br, xwsq_t pos, xwbmp_t sync[], xwtm_t to);
参数 to 表明线程期望在未来的某个时间点被唤醒。
当用户实现了一个具有超时功能的接口,写接口时发现其中需要调用多个具有超时功能的CAPI, 更糟糕的是这些CAPI内部可能又调用了其他具有超时功能的CAPI。
计算每个CAPI花费了多少时间,然后将他们从超时时间中减去,显然很难实现。 最简单的方式就是只看结果,即 只关注未来什么时间点要唤醒 。 将这个 未来时间点 在内部CAPI中传递,无论这些带有超时功能的CAPI调用多少层,只要发生超时就唤醒。
例如:
xwer_t my_api(..., xwtm_t to)
{
xwer_t rc;
...省略...
rc = xwos_mtx_lock_to(mtx, to);
...省略...
rc = xwos_sem_wait_to(sem, to);
...省略...
return rc;
}
无论 xwos_mtx_lock_to() 等待了多少时间,也不会影响 xwos_sem_wait_to() 在 to 这个时间点唤醒。
当 xwos_mtx_lock_to() 把时间用尽, to 就变成 过去的时间点 , xwos_sem_wait_to() 会立即返回 -ETIMEDOUT 。
获取上下文
XWOS提供CAPI xwos_skd_get_context_lc() 可以获取上下文:
XWOS_SKD_CONTEXT_INIT_EXIT:初始化与反初始化XWOS_SKD_CONTEXT_THD:线程XWOS_SKD_CONTEXT_ISR:中断XWOS_SKD_CONTEXT_BH:中断底半部XWOS_SKD_CONTEXT_IDLE:空闲任务
暂停和继续调度器
-
xwos_skd_pause_lc():暂停本地CPU调度器- 暂停调度器包括几个操作:
-
- 关闭本地CPU调度器的抢占;
-
- 关闭本地CPU调度器的中断底半部;
-
- 关闭本地CPU的系统定时器。
-
- 暂停调度器包括几个操作:
-
xwos_skd_continue_lc():继续运行本地CPU调度器- 继续运行调度器包括几个操作:
-
- 启动本地CPU的系统定时器;
-
- 打开本地CPU调度器的中断底半部;
-
- 打开本地CPU调度器的抢占。
-
- 继续运行调度器包括几个操作: